斜挂升降平台 斜挂轮椅升降平台 无障碍楼梯轮椅升降平台
发布时间 2022-08-15 11:43:49

产品描述
| 规格 | XG |
|---|---|
| 名称 | 斜挂升降平台 |


一、概述
秉承自由、灵活、便捷使用的设计理念,历经十年的摸索、实践,研制了XG无障碍升降平台,丰富和完善了国内各种复杂环境的无障碍通行设施改造方案。XG-X斜挂式无障碍升降平台更是南京群奕自动化有限公司重点产品之一。
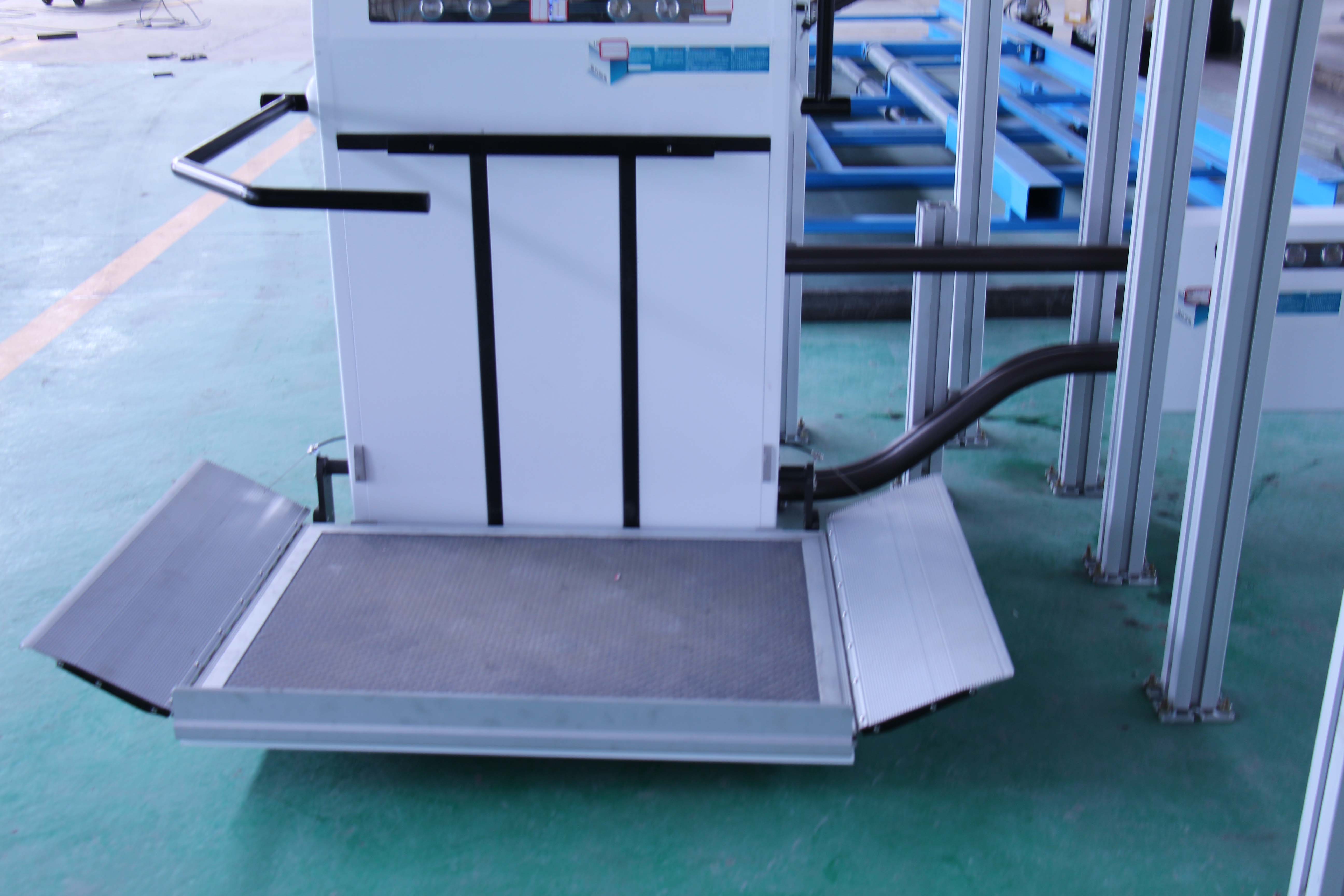
斜挂式轮椅升降平台,一种安装在楼道系统利用电机牵引沿着轨道上下移动并运载乘客的无障碍安全装置。它由驱动系统、导轨、绳轮链、移动平台等组成。用于建筑楼道系统中,乘坐轮椅或爬楼梯困难的人员攀爬楼梯的**设备。主要由主驱动系统,辅助驱动系统、主控系统和安全系统组成。
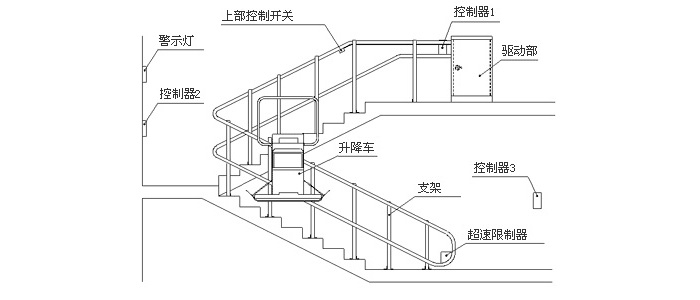
斜挂式轮椅升降平台主要为使用轮椅者提供上下楼梯的服务,其一般结构型式如下图所示。为了防止平台倾翻,设2根导轨。斜挂式轮椅升降平台主要由工作平台、支承架、护栏组成,主体是钢结构。工作平台是升降机的工作部分,表面复有防滑材料。平台的3个外向面都安装有安全护板,当平台运动受阻时,能使升降机停止运动。平台在不使用时可以向上折叠,以减少占用空间。

二、基本功能
+
全自动运行:无需人工干预,自动折叠、归位。
+
手控操作系统:手动控制切换开关,可以手动控制平台辅助驱动系统动作。
+ 运行警示,设有声音和灯光两种警示方式。
+
自动加减速:平台即将远离/到达着陆点时,自动加/减速。
+ 自检系统
+ 智能充电
+ 非正常操作不能运行
+ 安全踏板及安全围栏不到位不能运行
+
非接触式及接触式感应障碍物提前停止运行,障碍物移开自动继续运行。
+ 平台异常运行保护装置(安全保护系统)
+ 极限限位自动停止运行保护装置
+ 过电继电保护装置
+ 运行中紧急停止装置
+ 可与外部火警或警报系统联动
+
主踏板平台防滑花纹与喷漆,防滑系数不低于0.85
+ 操作简便
+ 智能无级变速
+ 适用性广泛
+ 远程遥控器控制

三、平台主要技术参数
标准载人平台尺寸
1000毫米×700毫米(非标平台尺寸)
额定负载
250公斤
速度 0~7M/MIN
离开或达到楼梯平台时减速
驱动系统
1.5KW-VVVF紧凑型驱动系统
导轨
独立驱动系统与轨道成整体,导轨及立柱材质均采用不锈钢
电源 AC 220/380V
50Hz-60Hz、15A
通信
载波通信
载人平台操作系统控制
无锁恒压方向按钮开关,DC24V,装有急停开关
呼叫站操作控制
无锁恒压平台运行方向开关;载人平台收、放恒压开关;电源锁,DC24V
表面涂层
经久耐用的静电喷塑及烤漆、海灰色涂料、不锈钢打磨以及标准颜色可以自由选择
弯曲的安全臂
全自动安全臂安装在平台上部880毫米处
步行者安全警示灯
安装在平台地板前后两端,琥珀色发光灯管
超速安全装置
安装在导轨底部,含有机械超速传感器和制动闸,电子驱动断流保护器
遇障碍即停
载人平台底部和坡板的安全感应板可以探测障碍物,如遇障碍即令平台停止运行
手动切换键
紧急情况时可以手动下降平台和折叠载人平台
驱动系统
绳轮链驱动系统
导向系统
模块式轨道系统
控制系统
PLC控制
过载保护
过电流继电器控制
护板形式
翻板(三侧安装、两边自动)
紧急停止
按下紧急按纽开关可控制机器运行
安全联锁
平台异常不能使用、安全防护不到位不能运行。
安全触板
运行中安全触板遇障碍物,运行立即停止
断电控制
无电或故障时,手动控制收起平台
安全翘板
上升时翘起
感知面与感知边
底板,主体,侧板安全传感器、用以感知障碍物
限速控制
智能变频控制,启动低速,直线加速,转弯减速
安全锁匙
**钥匙控制,专人专管
牵引方式
绳轮链驱动,并为上导轨开槽。
安全保护系统
独立的安全保护系统
动力机构
独立
操作
独立操作钥匙,开启平台控制柜内稳压开关和呼叫站着陆开关
靠位置、停放位置
低位
暂停按键
在设备各停靠点以及平台上均配有暂停按键,配有步行者安全警示灯
非接触式感应器探测运行方障碍物
载人平台配有红外线感应器探测运行方障碍物,如遇障碍平台停止运行
手控系统
紧急情况时可以手动下降和折叠载人平台
报警装置
配有紧急呼叫帮助按钮、不同情况不同声音报警
无线遥控器
在紧急情况或操作人员控制时使用
外观颜色
银色/客户可自定选择
端站指示灯
配有运行、检修及平台运行指示灯
可折叠座椅
配有安全带和气动弹簧自动收起
四、斜挂式无障碍升降平台工作原理
斜挂式无障碍轮椅升降平台主要采用PLC和变频调速器控制方式进行控制。PLC收集信息并处理之后发出指令,变频调速器根据PLC指令来控制电动机的运转机器速度。
PLC工作原理
可编程控制器,英文称ProgrammableLogicController,简称PLC。PLC是基于电子计算机,且适用于工业现场工作的电控制器。它源于继电控制装置,但它不像继电装置那样,通过电路的物理过程实现控制,而主要靠运行存储于PLC内存中的程序,进行入出信息变换实现控制。
PLC采用“顺序扫描,不断循环”的工作方式
1.每次扫描过程,集中采集输入信号,集中对输出信号进行刷新。
2.输入刷新过程,当输入端口关闭时,程序在进行执行阶段时,输入端有新状态,新状态不能被读入。只有程序进行下一次扫描时,新状态才被读入。
3.一个扫描周期分为输入采样,程序执行,输出刷新。
4.元件映象寄存器的内容是随着程序的执行变化而变化的。
5.扫描周期的长短由三条决定。
(1)CPU执行指令的速度
(2)指令本身占有的时间
(3)指令条数,现在的PLC扫描速度都是非常快的。
变频调速器工作原理
主电路是给异步电动机提供调压调频电源的电力变换部分,变频器的主电路大体上可分为两类:电压型是将电压源的直流变换为交流的变频器,直流回路的滤波是电容。电流型是将电流源的直流变换为交流的变频器,其直流回路滤波是电感。
它由三部分构成,将工频电源变换为直流功率的“整流器”,吸收在变流器和逆变器产生的电压脉动的“平波回路”,以及将直流功率变换为交流功率的“逆变器”。
整流器
**近大量使用的是二极管的变流器,它把工频电源变换为直流电源。也可用两组晶体管变流器构成可逆变流器,由于其功率方向可逆,可以进行再生运转。
平波回路
在整流器整流后的直流电压中,含有电源6倍频率的脉动电压,此外逆变器产生的脉动电流也使直流电压变动。为了抑制电压波动,采用电感和电容吸收脉动电压(电流)。装置容量小时,如果电源和主电路构成器件有余量,可以省去电感采用简单的平波回路。
逆变器
同整流器相反,逆变器是将直流功率变换为所要求频率的交流功率,以所确定的时间使6个开关器件导通、关断就可以得到3相交流输出。以电压型pwm逆变器为例示出开关时间和电压波形。
控制电路
是给异步电动机供电(电压、频率可调)的主电路提供控制信号的回路,它有频率、电压的“运算电路”,主电路的“电压、电流检测电路”,电动机的“速度检测电路”,将运算电路的控制信号进行放大的“驱动电路”,以及逆变器和电动机的“保护电路”组成。
(1)运算电路:将外部的速度、转矩等指令同检测电路的电流、电压信号进行比较运算,决定逆变器的输出电压、频率。
(2)电压、电流检测电路:与主回路电位隔离检测电压、电流等。
(3)驱动电路:驱动主电路器件的电路。它与控制电路隔离使主电路器件导通、关断。
(4)速度检测电路:以装在异步电动机轴机上的速度检测器的信号为速度信号,送入运算回路,根据指令和运算可使电动机按指令速度运转。
(5)保护电路:检测主电路的电压、电流等,当发生过载或过电压等异常时,为了防止逆变器和异步电动机损坏,使逆变器停止工作或抑制电压、电流值。
五、结构图
济南金泉升降机械有限公司
进入店铺
在线留言
| 联系人 | 刘经理 |
|---|---|
| 联系电话 | 0531-84227930 15662757281 |
| 地址 | 山东省济南市济阳济北开发区 |
| 邮箱 | 15662757281@163.com |